Примечание.
Для доступа к этой странице требуется авторизация. Вы можете попробовать войти или изменить каталоги.
Для доступа к этой странице требуется авторизация. Вы можете попробовать изменить каталоги.
С Windows Holographic версии 21H2, HoloLens 2 поддерживает низкодинамическую движущую платформу. При использовании поддерживаемой версии ОС и включении режима перемещения платформы вы сможете использовать HoloLens 2 в ранее недоступных средах, таких как крупные корабли и крупные морские суда. В настоящее время эта функция нацелена на включение только этих конкретных движущихся платформ. Хотя ничего не мешает вам использовать функцию в других средах, эта функция сосредоточена на добавлении поддержки этих сред.
В этой статье рассматриваются следующие статьи:
Почему требуется режим перемещения платформы
HoloLens должен быть в состоянии отслеживать положение головы с 6 градусов свободы (X, Y, Z, перевод и свертки, шаг, поворот яжига) для отображения стабильных голограмм. Для этого HoloLens отслеживает два аналогичных фрагмента информации из двух отдельных источников:
- Видимые световые камеры. Эти камеры отслеживают среду, например физическую комнату, в которой вы используете HoloLens
- Единица измерения инерции (IMU). IMU состоит из акселерометра, гироскопа и магнитометра, который отслеживает движение головы и ориентацию относительно инерционного кадра. Мы можем предположить, что движение Земли не является значительным для отслеживания гарнитуры, и поэтому мы можем упростить рассмотрение движения относительно Земли.
Сведения из этих двух источников составной для отслеживания положения головы с низкой задержкой и достаточной частотой для отображения гладких голограмм.
Однако этот подход основывается на критическом предположении; Среда (отслеживаемая камерами) остается неподвижной относительно Земли (против которой IMU может делать измерения). Если это не так, как на лодке в воде, информация из обоих источников может конфликтовать друг с другом и вызвать следчик потеряться. Этот конфликт создает неправильные сведения о положении и приводит к плаванию голограмм или даже отслеживанию потери.
При перемещении режима платформы эта проблема устранена. Если включить режим перемещения платформы, это намек на трекер, который он не может полагаться на входные данные датчика, чтобы полностью согласиться друг с другом всегда. Вместо этого HoloLens необходимо поддерживать оценку движения платформы, чтобы позволить ему соответствующим образом преобразовывать измерения IMU или фильтровать их, если движение платформы является неопределенным.
Поддерживаемые среды и известные ограничения
В то время как режим движущейся платформы был разработан для интеллектуальной обработки случаев инерции и конфликта визуальных данных, он в настоящее время ограничен крупными морскими судами, испытывающими низкодинамическую движения. Это означает, что существуют, безусловно, ограничения и неподдерживаемые сценарии.
Известные ограничения
- Единственными поддерживаемыми средами для режима перемещения платформы (MPM) являются крупные морские суда, испытывающие низкодинамическую движения. Другими словами, многие распространенные среды и ситуации пока не поддерживаются из-за их высокой частоты движения и высокого уровня ускорения и рывок. Например: самолеты, поезда, автомобили, велосипеды, автобусы, небольшие лодки, лифты и т. д.
- Голограммы могут слегка колебаться при включении MPM, особенно при использовании измельчной воды.
- Ничто не запрещает пользователям пытаться использовать MPM в неподдерживаемых средах, однако вы можете столкнуться с нежелательными побочными эффектами, если устройство может поддерживать отслеживание в неподдерживаемом пространстве. Например, с MPM вы можете найти, что можно использовать в лифте во время смены этажей, в то время как это было ранее невозможно. К сожалению, в то время как MPM позволяет устройству поддерживать отслеживание, он не обрабатывает управление картами в настоящее время. Вы можете найти, что изменение этажей в лифте приводит к тому, что устройство путает верхние и нижние этажи и отрицательно влияет на качество карты.
Необходимые условия
Для поддержки режима перемещения платформы требуются следующие предварительные требования:
Установите Windows Holographic версии 21H2 или более поздней, обновив или вспомахив последнюю сборкучерез ARC.
Заметка
В то время как режим перемещения платформы был представлен в 21H2, он предлагает использовать последнюю сборку для использования полного диапазона функций и обновлений.
Включение режима перемещения платформы
Как активировать режим движущейся платформы?
Существует четыре способа включения режима движущейся платформы.
- с помощью приложения параметров на устройстве
- с помощью политик управления мобильными устройствами (MDM)
- черезAPI, API выпускается с помощью средства функции смешанной реальности в Unity и через Nuget.org
- С помощью портала устройства
Для включения ряда вариантов использования были предоставлены различные методы для активации режима движущейся платформы. Важно тщательно учесть, какой метод выбрать. Ключевой вопрос: Кто знает, находится ли HoloLens 2 в настоящее время в движущейся платформе? Пример см. в следующей таблице:
| Кто знает, находится ли HL2 на движущейся платформе | Лучший метод настройки режима перемещения платформы | Преимущества | Издержки |
|---|---|---|---|
| Системный администратор | управления мобильными устройствами |
Пользователю не нужно участвовать. Любое приложение будет работать без изменений. Устройство можно защитить от ввода неправильного режима. | Пользователь и приложения не могут изменить режим. |
| Конечный пользователь | приложения параметров | Пользователь часто наиболее осведомлен о том, когда и где они используют устройство. Любое приложение будет работать без изменений. | Пользователь может не знать, что режим существует. |
| Приложение | использование пакета SDK | Подсказки конкретного варианта использования можно использовать для переключения режима, когда среда не может быть известна заранее. Удаляет требование, которое пользователь должен принять это решение и изменить режим в параметрах. | Плохо разработанное приложение может дать плохой опыт и оставить устройство в непредвиденном режиме. |
Параметры устройства
- Требуется сборка 20348.1447 или более поздней версии.
Открытие меню "Пуск"
Открытие приложения "Параметры"
Выберите System
Открытие гол ограмм
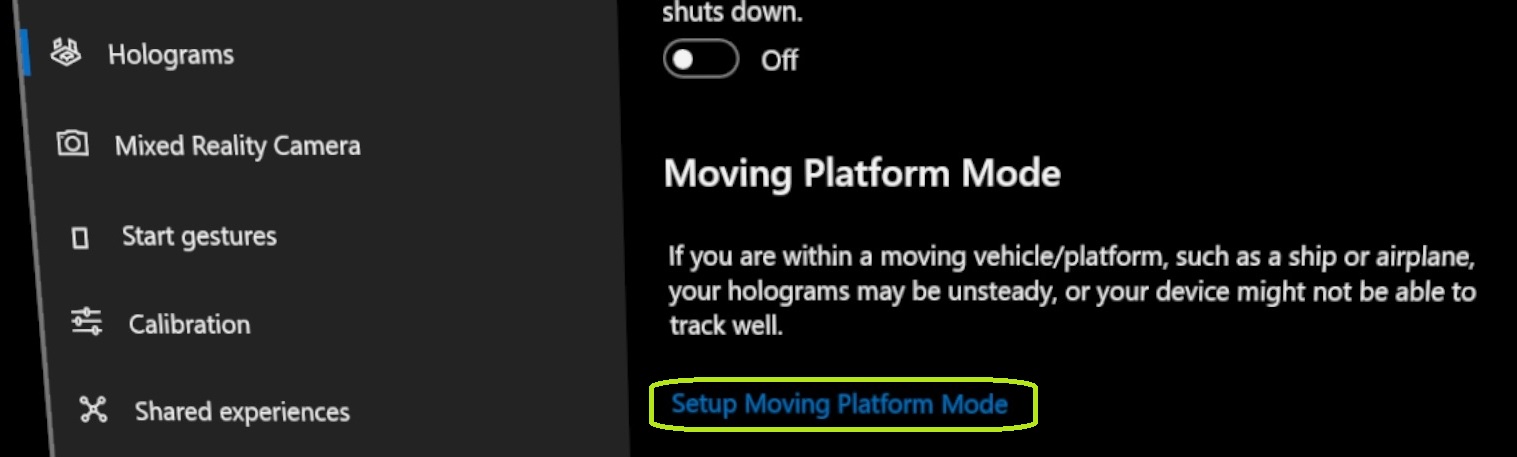
В разделе "Режим движущейся платформы" выберите Настройка режима перемещения платформы
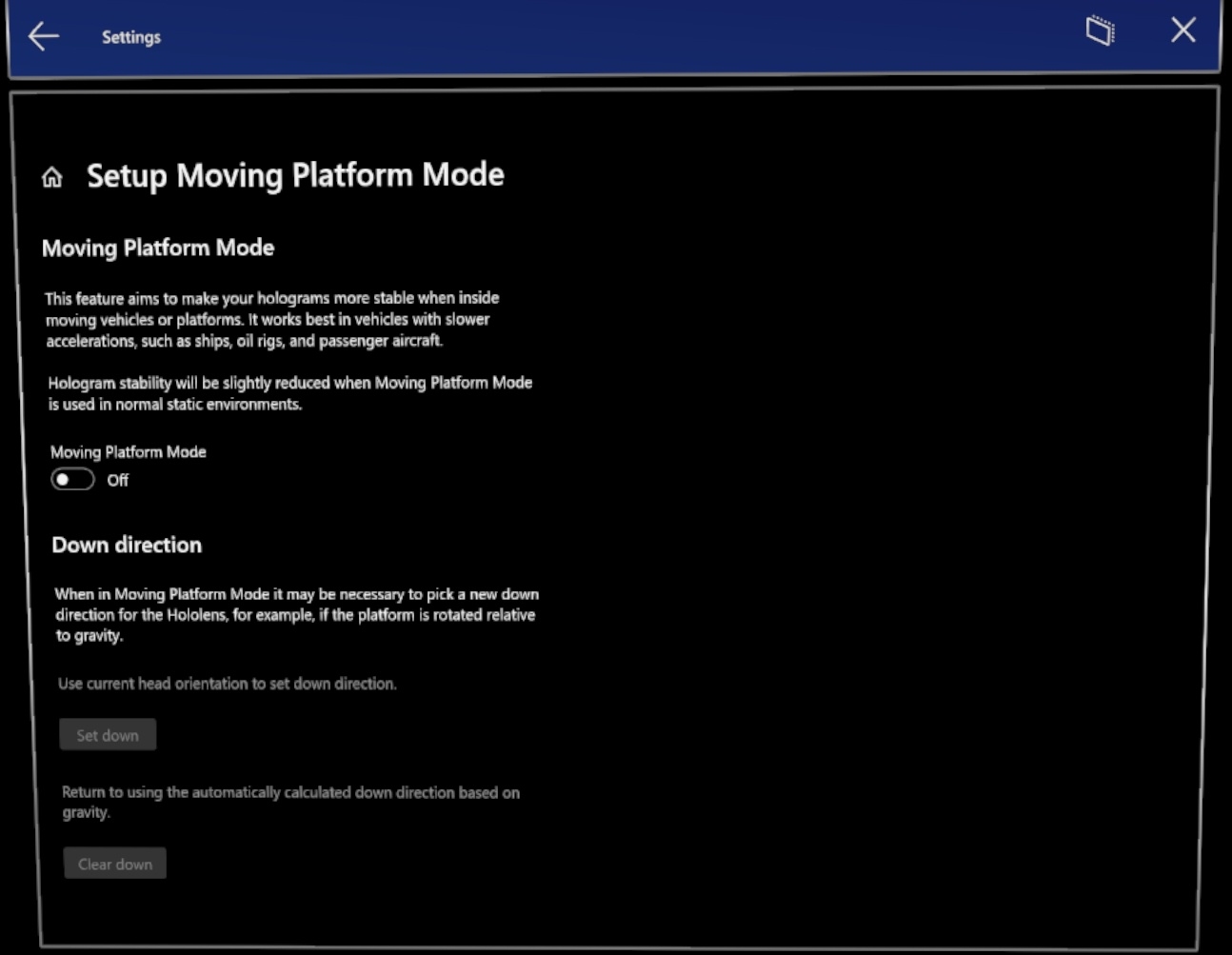
 режима движущейся платформы
режима движущейся платформыПереключение режима перемещения платформы на в
страница
С помощью управления мобильными устройствами (MDM)
- Требуется сборка 20348.1447 или более поздней версии.
MDM — это средство для системных администраторов, чтобы задать определенные параметры на устройствах, принадлежащих организации. Дополнительные сведения см. в статье Использование Microsoft Endpoint Manager Intune для управления устройствами HoloLens. Системные администраторы могут выбрать один из трех вариантов:
- Принудительное перемещение режима платформы на устройстве.
- Принудительное перемещение режима платформы для устройства.
- Разрешить пользователям выбирать с помощью приложения параметров или портала устройств.
MixedReality/ConfigureMovingPlatform
Эта политика управляет поведением функции перемещения платформы в HoloLens 2. В частности, отключается ли он или может быть переключается пользователем. Он должен использоваться только клиентами, которые намерены использовать HoloLens 2 в перемещаемых средах с низким динамическим движением. Дополнительные сведения см. в
OMA-URI новой политики: ./Device/Vendor/MSFT/Policy/Config/MixedReality/ConfigureMovingPlatform
Поддерживаемые значения:
-
0(по умолчанию): значение — это предпочтение пользователя. Начальное состояние — OFF и после сохранения предпочтения этого пользователя во время перезагрузки и используется для инициализации системы. -
1Принудительное отключение. Перемещение платформы отключено и не может быть изменено пользователем. -
2Force on: включена перемещенная платформа и не может быть изменена пользователем.
MixedReality/ManualDownDirectionDisabled
Эта политика определяет, может ли пользователь изменить направление вниз вручную или нет. Если направление вниз не задано пользователем, то автоматически вычисляемое направление используется системой. Эта политика не зависит от политики ConfigureMovingPlatform, и их можно задать независимо.
OMA-URI новой политики: ./Device/Vendor/MSFT/Policy/Config/MixedReality/ManualDownDirectionDisabled
Поддерживаемые значения:
-
False(по умолчанию): пользователь может вручную изменить направление вниз при необходимости, в противном случае направление вниз определяется автоматически на основе вектора тяжести измерения. -
True. Пользователь не может вручную изменить направление вниз и направление вниз всегда будет определяться автоматически на основе измеряемого вектора гравитации.
Включение с помощью пакета SDK
- Требуется сборка 20348.1447 или более поздней версии.
Иногда может потребоваться, чтобы решение о том, следует ли использовать режим перемещения платформы, чтобы зависеть от вашей ситуации, может потребоваться включить его только при использовании приложения или только определенного приложения. В этих случаях вы можете включить режим перемещения платформы из приложения с помощью пакета SDK.
Включение с помощью режима разработчика и портала устройств
Чтобы включить режим перемещения платформы таким образом, сначала включитьпортала устройств.
Выберите системный аккордеон в меню слева
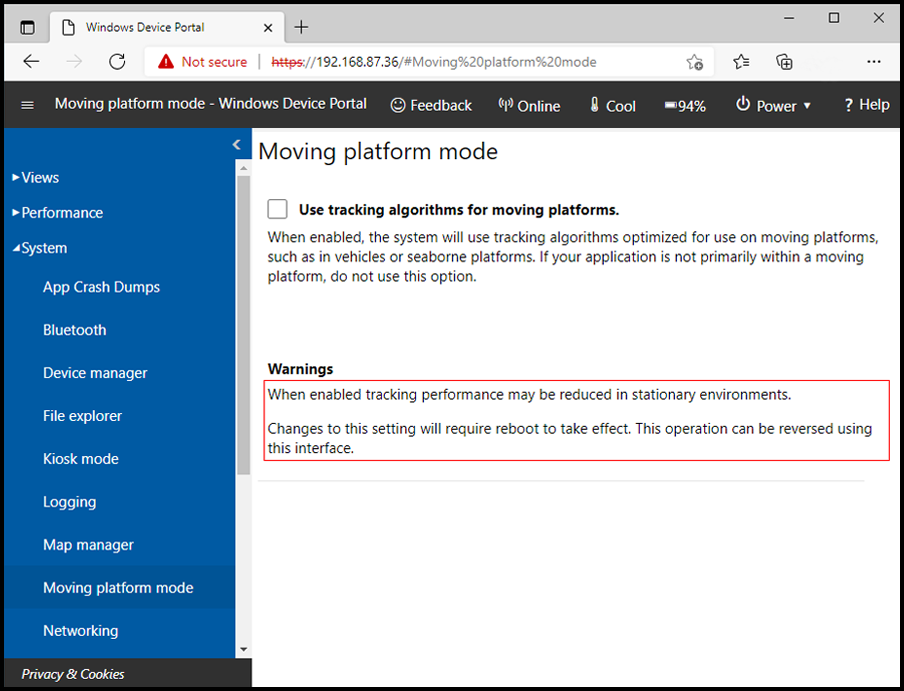
Выберите страницу
режиме перемещения платформы и установите флажок режим перемещения платформы 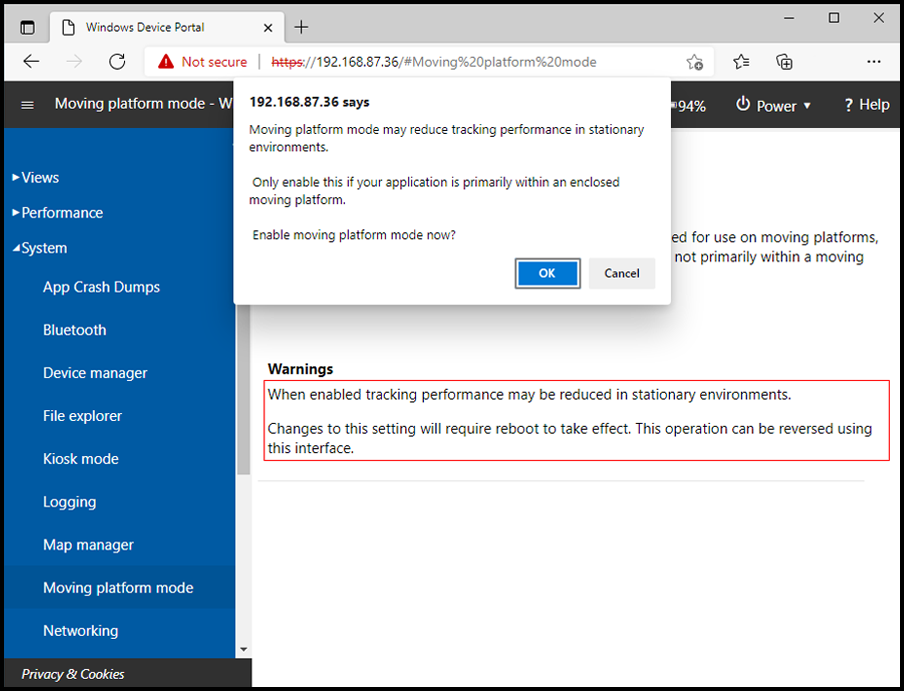
При появлении запроса с предупреждением нажмите кнопку ОК
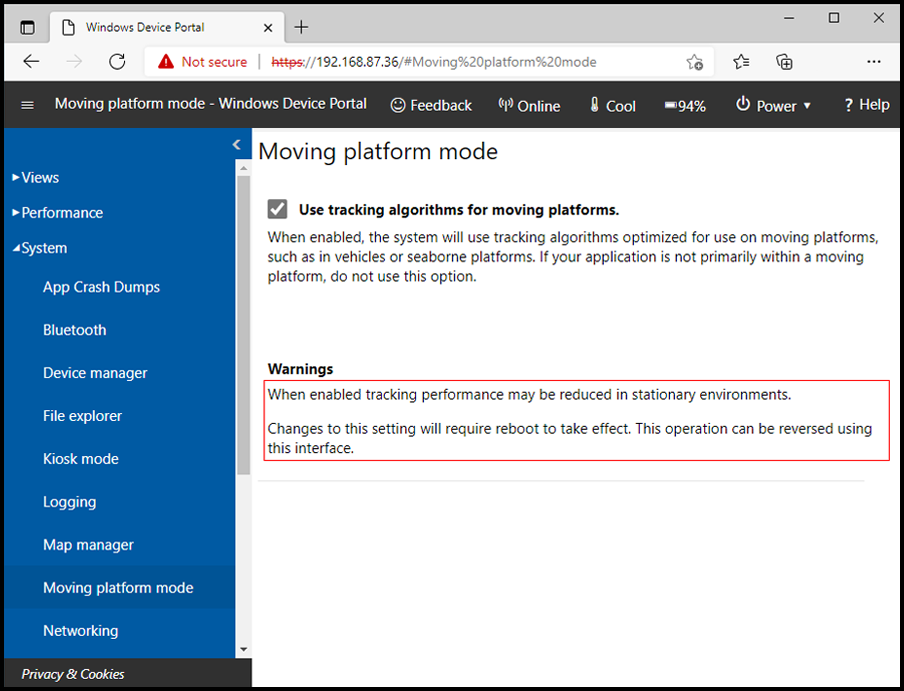
Режим изменится немедленно, перезагрузить устройство не нужно.
Если вы не можете просмотреть параметр "Режим движущейся платформы" на портале устройств, скорее всего, вы еще не находитесь в правильной сборке. См. раздел предварительных требований.
Когда необходимо перейти на режим перемещения платформы и с этого режима
При использовании любого из этих методов отслеживание гарнитуры будет временно потеряно, и в дисплеях отображается "поиск места". Поэтому не рекомендуется активно изменять режим во время использования устройства.
Если вариант использования перемещается между стационарными средами и перемещается, рекомендуется оставить устройство в режиме перемещения платформы. Качество отслеживания, когда в стационарных средах будет немного сокращено. Хотя большинство считают это лучше, чем потеря отслеживания, возникаемая путем переключения режима перемещаемой платформы часто или потери отслеживания на движущейся платформе из-за забыть активировать режим.
Направление вниз
Как правило, направление, которое считается "вниз" системой является направление тяжести. Это направление вниз используется для выравнивания некоторых пользовательских интерфейсов. Однако в движущейся платформе "вниз" и гравитации не всегда то же самое. Режим перемещения платформы предоставляет два решения этой проблемы:
Автоматическое вычисление
Это вычисляет направление вниз на основе среднего измеряемого направления тяжести. Например, как корабль катится в море, фактический вектор гравитации поворачивается относительно структуры корабля. Среднее векторы гравитации в течение короткого времени будет указывать на пол кабины корабля из-за колебаний вектора гравитации будет отменен.
Автоматическое вычисление — это значение по умолчанию, если в режиме перемещения платформы не требуется ничего делать для правильной работы. Переопределяется, если задано направление вниз вручную. Конкретное направление вниз не будет сохранено на устройстве, но будет пересчитываться при необходимости.
Вручную задать направление
В случае использования, когда ориентация платформы не соответствует гравитации, даже если среднее значение за короткий период времени, можно вручную задать направление вниз. Чтобы задать направление вручную, выполните приведенные ниже действия.
- Открытие меню "Пуск"
- Откройте приложение параметров
- Выберите System
- Выберите Голограммы
- В разделе "Режим движущейся платформы" выберите Настройка режима перемещения платформы
- Выровняйте голову с полом, чтобы вы смотрели на горизонт
- Нажмите кнопку "
"
При нажатии кнопки "Задать вниз" будет использоваться текущая ориентация головы для задания направления вниз. Если направление вниз устанавливается вручную, оно сохраняется постоянно на устройстве и будет отзываться после перезагрузки или потери отслеживания.
Чтобы очистить направление вниз, хранящееся в системе, нажмите кнопку Очистить на странице настройка режима перемещения платформы. Это очищает направление, сохраненное вниз, и делает систему автоматически вычисляемым направление. Определенное направление, заданное вручную, не может быть восстановлено после этой операции, необходимо снова задать его с помощью приведенного выше процесса.
Проблемы с отчетами
Вы можете столкнуться с проблемами, если это произойдет, сообщить о проблемах, чтобы их можно было изучить и улучшить продукт:
- Сообщите о проблеме с помощью центра отзывов в соответствии с точностью голограммы , стабильностью и надежностью категории и включают:
- Описание проблемы, включая ожидаемое поведение и опытное поведение
- проблемы
смешанной реальности
- Откройте вариант поддержки на https://aka.ms/hlsupport и поделитесь URL-адресом Центра отзывов, чтобы мы могли обратиться в случае, если у нас есть дополнительные вопросы.