MFCameraExtrinsic_CalibratedTransform structure (mfapi.h)
A transform describing the location of a camera relative to other cameras or an established external reference.
Syntax
typedef struct _MFCameraExtrinsic_CalibratedTransform {
GUID CalibrationId;
MF_FLOAT3 Position;
MF_QUATERNION Orientation;
} MFCameraExtrinsic_CalibratedTransform;
Members
CalibrationId
A reference GUID identifying the calibration process for the data, allowing different consumers to identify calibration data from the same process.
Position
The transform position.
Orientation
The transform rotation.
Remarks
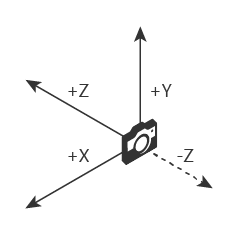
The Position value should be expressed in real-world coordinates in units of meters. The coordinate system of both position and orientation should be right-handed Cartesian as shown in the following diagram.
The Position and Orientation have different interpretations for stand-alone sensor groups, and for Windows Mixed Reality devices.
For stand-alone sensor groups, the position and orientation express the location of the origin of the group in the sensor's coordinate system. For example, a Position value of {-5, 0, 0} means that the origin is 5 meters to the left of the sensor, and therefore the sensor is 5 meters to the right of the origin. A sensor that is positioned 2 meters above the origin should specify a Position of {0, -2, 0} because that is the position of the origin relative to the sensor.
If the sensor is aligned with the origin, the rotation is the identity quaternion and the forward vector is along the -Z axis {0, 0, -1}. If the sensor is rotated +30 degrees around the Y axis from the origin (i.e. to the left), then the Orientation value should be a rotation of -30 degrees around the Y axis, because it represents the orientation of the origin, relative to the sensor.
Windows Mixed Reality devices
Sensors attached to a Windows Mixed Reality device (e.g. a HoloLens) express their calibration using the opposite convention, so the position and orientation indicate the location of the sensor in the device's coordinate system. For example, a sensor which is located 5 centimeters to the right of the origin of the device will have a Position of {0.05, 0, 0} because that is the position of the sensor, relative to the device. Likewise, if a sensor is rotated +10 degrees around the Y axis from the device (i.e. to the left), then the Orientation value will be a rotation of +10 degrees about the Y axis, because it represents the orientation of the sensor, relative to the device. In addition, the CalibrationId can be passed to SpatialGraphInteropPreview.CreateLocatorForNode to create a SpatialLocator which represents the Windows Mixed Reality device. This can be used to compute the location of the sensor in space for a given frame, by querying the location of the SpatialLocator at the time the frame was captured, and combining this with the Position and Orientation of the MFCameraExtrinsic_CalibratedTransform. To query the device's location for a frame, pass the timestamp of the frame given by IMFSample::GetSampleTime to PerceptionTimestampHelper.FromSystemRelativeTargetTime, and pass the resulting PerceptionTimestamp to SpatialLocator.TryLocateAtTimestamp.
To determine whether an IMFSample came from a sensor attached to a Windows Mixed Reality device, look for the following property attached to the frame, set to MFCameraExtrinsicsCalibrationType_SpatialGraphDynamicNode:
typedef enum _MFCameraExtrinsicsCalibrationType
{
MFCameraExtrinsicsCalibrationType_Unknown = 0,
MFCameraExtrinsicsCalibrationType_SpatialGraphDynamicNode = 1
} MFCameraExtrinsicsCalibrationType;
DEFINE_GUID(MFSampleExtension_CameraExtrinsicsCalibrationType, 0x3524e3b0, 0xc355, 0x49f1, 0xb8, 0xb0, 0xd0, 0xdd, 0x62, 0xde, 0x37, 0xa7);
Requirements
| Requirement | Value |
|---|---|
| Minimum supported client | Windows 10 [desktop apps only] |
| Minimum supported server | Windows Server 2016 [desktop apps only] |
| Header | mfapi.h |